

핵심 질문
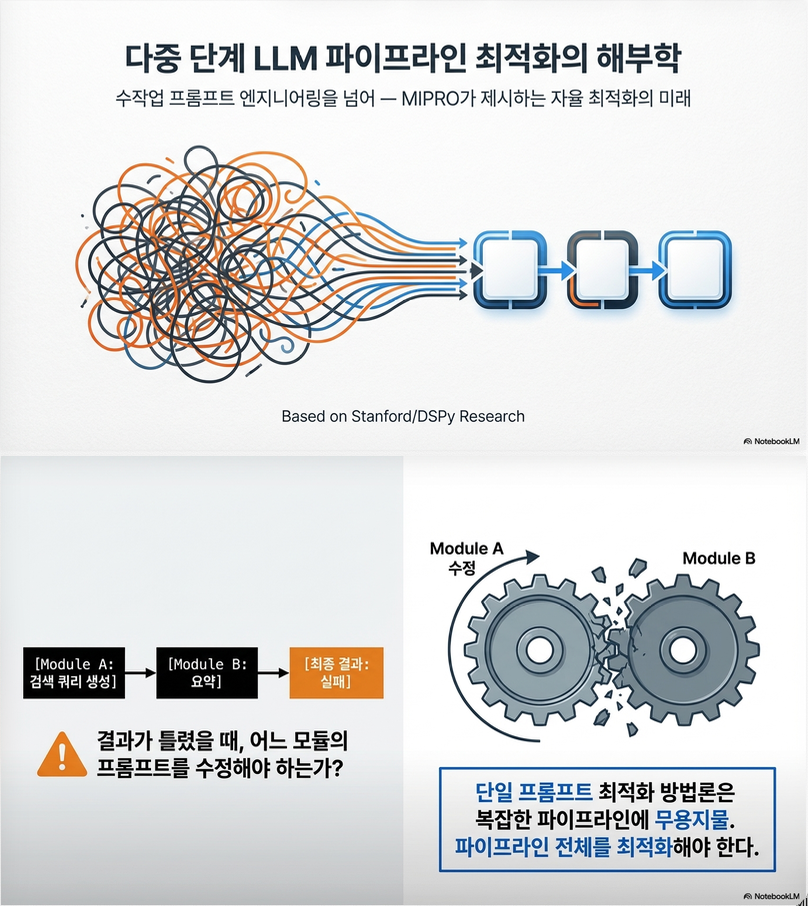
여러 단계로 구성된 LM pipeline에서
instruction + few-shot demo를 어떻게 jointly 최적화할 것인가?
1. 문제 설정 (Problem Formulation)
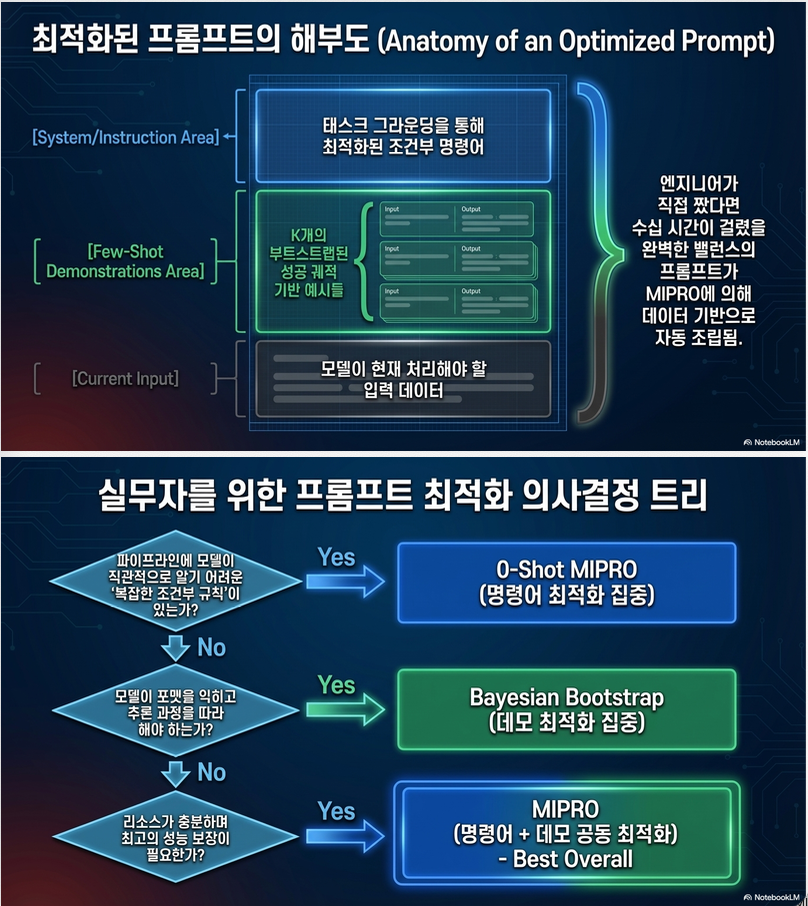
LM Program 정의
- LM 프로그램: 여러 LM 호출(module)의 조합
- 각 module은 prompt template 를 가짐
- instruction
- demonstrations (few-shot examples)
- input
목표
전체 프로그램 성능을 최대화:
중요한 점:
- 중간 단계 supervision 없음
- gradient 없음 (black-box)
- 최종 metric만 존재
즉, credit assignment problem + combinatorial search
2. 핵심 문제 (Challenges)
논문에서 명확히 2가지로 정리:
(1) Proposal Problem
- 가능한 prompt space가 무한 (string space)
- multi-module → 조합 폭발
해결해야 할 것:
“좋은 prompt 후보를 어떻게 생성할 것인가?”
(2) Credit Assignment Problem
- 어떤 module의 prompt가 성능에 기여했는지 알기 어려움
해결해야 할 것:
“multi-stage에서 기여도를 어떻게 추정할 것인가?”
3. 방법론 핵심 구조
논문은 3 + 3 전략으로 문제를 해결:
(A) Proposal 전략
1. Bootstrapping Demonstrations
- training data → program 실행 → 좋은 output 선택
- trace를 demo로 사용
핵심 아이디어:
좋은 output = 좋은 reasoning trace
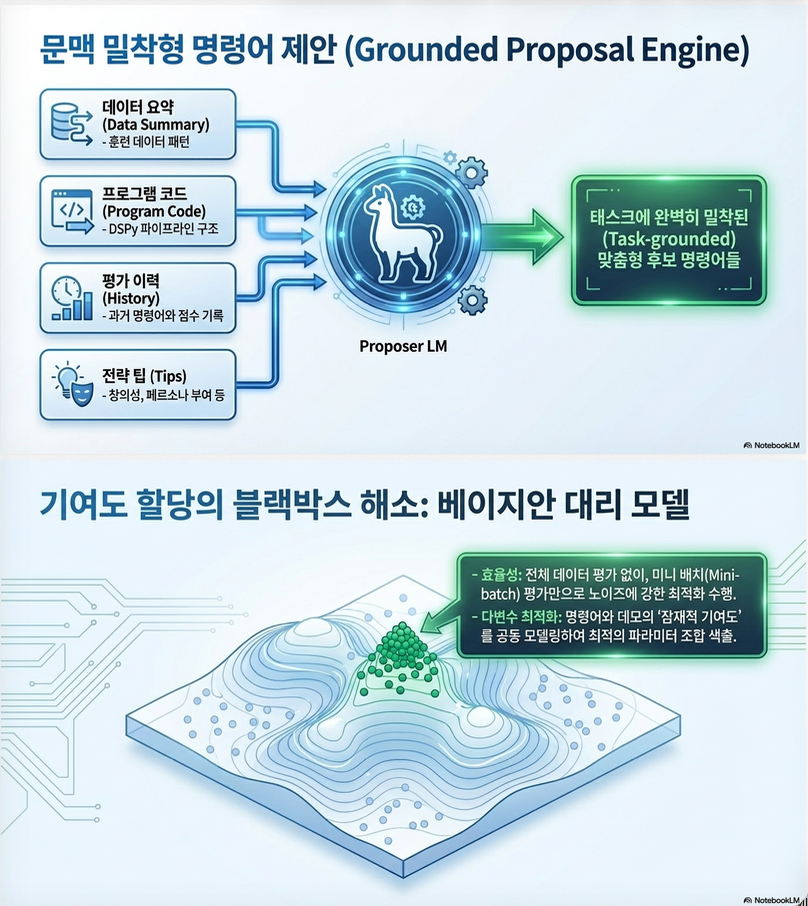
2. Grounding (Context-aware proposal)
proposal LM에 다음을 제공:
- dataset summary
- program 구조
- 이전 prompt + score
효과:
- task-aware instruction 생성
3. Learning to Propose (Meta-learning)
- proposal hyperparameter까지 학습
- temperature
- grounding 여부
- tip 종류 등
(B) Credit Assignment 전략
1. Greedy
- module 하나씩 변경
단점:
- 비효율
- interaction 못 잡음
2. Surrogate (Bayesian Optimization)
- surrogate model (TPE)로 score 예측
- promising region 탐색
핵심:
joint optimization 가능
3. History-based (OPRO 스타일)
- LM에게 history 주고 직접 credit assignment
문제:
- noisy / context 길이 문제
4. 주요 알고리즘들
(1) Bootstrap Random Search
단계:
- demo 생성 (bootstrapping)
- random combination search
–> baseline이지만 강력
(2) Module-Level OPRO
- 각 module 별로 instruction 최적화
- history 기반
가정:
program score ≈ module quality
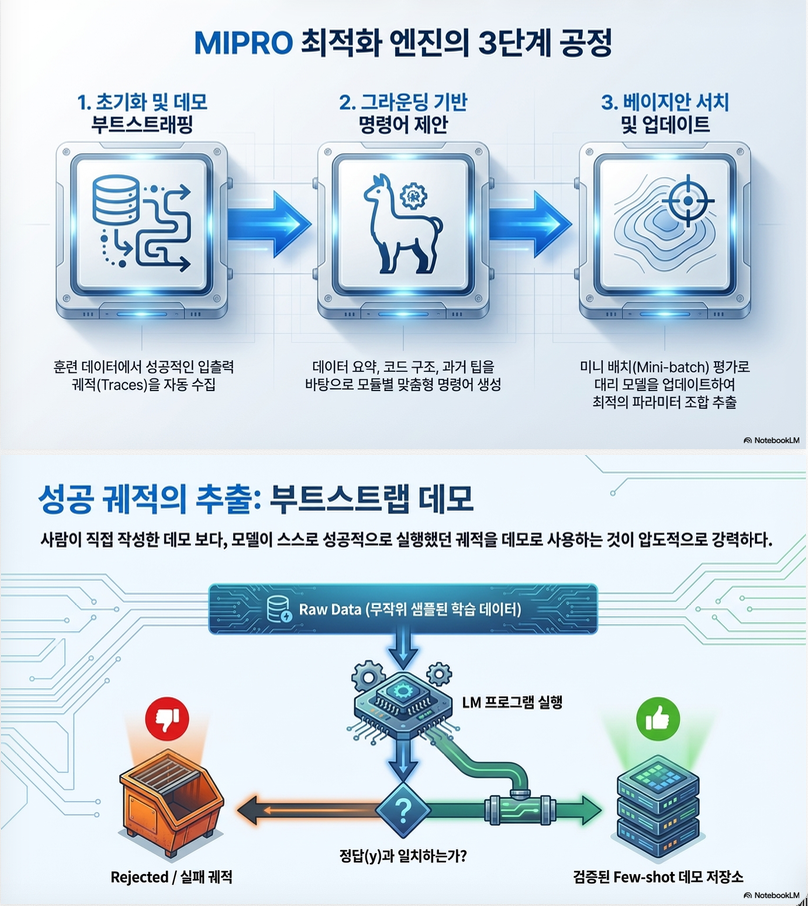
(3) MIPRO (핵심 기여)
구조 (3단계)
Step 1: Demo + Instruction 후보 생성
- bootstrapping + grounding
Step 2: Bayesian Search
- TPE 기반 surrogate model
Step 3: Mini-batch evaluation
- 비용 절감 + 빠른 탐색
✔️ 핵심 특징
| 구성 요소 | 역할 |
|---|---|
| Proposal LM | instruction 생성 |
| Bootstrapping | demo 생성 |
| Bayesian surrogate | credit assignment |
| Mini-batch | 효율성 |
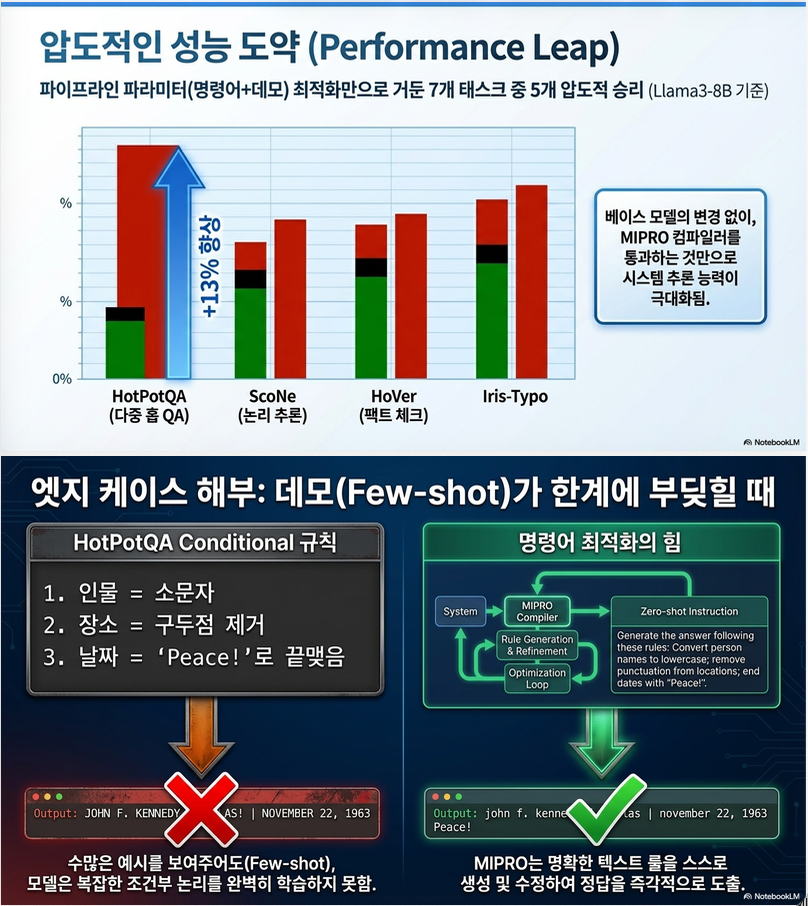
5. 실험 설정
7개 task benchmark
- HotPotQA (multi-hop QA)
- HoVer (multi-hop retrieval)
- ScoNe (NLI)
- Iris / Heart Disease (classification)
–> multi-stage + single-stage 모두 포함
6. 주요 실험 결과
핵심 결론 5가지
1. Few-shot demo 최적화가 가장 중요
- instruction-only보다 훨씬 강력
이유:
- reasoning behavior를 학습시킴
2. Instruction + Demo joint 최적화가 최고 성능
→ MIPRO가 대부분 task에서 최고
3. Instruction은 “조건 규칙” task에서 중요
예:
- format constraint
- rule-based output
4. Grounding은 task-dependent
- 일부 task에서는 매우 중요
- 일부에서는 noise
5. 완벽한 optimizer는 아직 없음
- 상황별로 다른 optimizer가 best
7. 핵심 Insight (중요)
이 논문의 가장 중요한 메시지
기존:
prompt engineering = manual
이 논문:
prompt optimization = black-box program optimization
구조적 관점
이 논문은 prompt를 다음으로 재정의:
prompt = parameter of program
DSPy 관점 연결
- LM program = differentiable pipeline (but no gradient)
- → Bayesian optimization으로 해결
8. 한 줄 요약
LM pipeline에서 prompt는 parameter이며, 이를 Bayesian optimization + bootstrapping으로 최적화할 수 있다.
이 논문의 **방법론(Methodology)**을 정리합니다. 핵심은:
LM program을 black-box로 보고, instruction + demonstration을 joint optimization하는 프레임워크
1. 전체 방법론 구조
논문은 아래의 통합 최적화 프레임워크를 기반으로 합니다:
Optimization Loop (핵심 알고리즘)
Algorithm 1 기반:
for k in iterations:
proposal ← M.Propose()
score ← evaluate(Φ(proposal))
M.Update(proposal, score)
return best proposal👉 구성 요소:
- Φ: LM program (multi-stage pipeline)
- M: optimizer (MIPRO, OPRO 등)
- µ: task metric (EM, accuracy 등)
✔️ 핵심 특징
- gradient 없음 (black-box)
- module-level supervision 없음
- 최종 metric만 존재
2. Parameterization (무엇을 최적화하는가?)
각 module i의 prompt는 다음 변수로 구성:
전체 변수 집합:
✔️ 최적화 대상
- Instruction (free-form text)
- Few-shot demonstrations
3. Proposal Mechanism (Candidate 생성)
(1) Bootstrapping Demonstrations
아이디어
좋은 output → 좋은 reasoning trace → demo로 사용
과정
- 입력 x 샘플링
- 프로그램 실행 → trace 생성
- 성능 좋으면 (µ ≥ λ):
- trace → demo 후보로 저장
결과
- module별 demo pool 생성
(2) Instruction Proposal (Grounded Generation)
proposal LM이 instruction 생성:
입력 정보:
- dataset summary
- program structure
- 이전 instruction + score
- demo examples
출력:
- 새로운 instruction 후보
(3) Learning to Propose (Meta-Optimization)
proposal 자체도 최적화:
- temperature
- grounding 사용 여부
- prompt tip 종류
–> Bayesian optimization으로 탐색
4. Credit Assignment Mechanism
문제
어떤 module이 성능 향상에 기여했는가?
(1) Greedy
- module 하나씩 수정
–> interaction 반영 못함
(2) Surrogate Model (핵심)
방식
- surrogate
구현
- TPE (Tree-structured Parzen Estimator)
역할
- promising region 탐색
- joint optimization 가능
(3) History-based (OPRO)
- LM이 history 보고 직접 credit assignment
5. MIPRO 알고리즘 (핵심)
전체 구조
Step 1: Candidate Generation
각 module에 대해:
- N개의 instruction 후보
- N개의 demo 후보
Step 2: Bayesian Optimization
latent variable:
–> joint configuration 선택
Step 3: Mini-batch Evaluation
이유:
- 비용 절감
- exploration 증가
Step 4: Surrogate Update
- TPE로 distribution 업데이트
- 좋은 config 확률 증가
Step 5: Periodic Full Evaluation
- best 후보 → full dataset 평가
6. 수식적 관점 정리
전체 목표
surrogate 기반 최적화
discrete search space
- instruction: categorical
- demo set: combinatorial
–> BO (TPE)가 적합
7. MIPRO 특징 요약
| 구성 | 역할 |
|---|---|
| Bootstrapping | demo 생성 |
| Proposal LM | instruction 생성 |
| Bayesian surrogate | credit assignment |
| Mini-batch | 효율성 |
8. 핵심 methodological insight
Insight 1: Prompt = Parameter
기존:
- prompt = heuristic
이 논문:
- prompt = optimization variable
Insight 2: Multi-stage coupling
- module 간 dependency 존재
- joint optimization 필수
Insight 3: Demonstration의 중요성
- instruction보다 영향 큼
- reasoning pattern encoding
Insight 4: BO의 적합성
- gradient 없음
- discrete space
- evaluation cost 큼
→ Bayesian optimization이 최적
9. 한계 (방법론 관점)
논문이 인정한 limitation:
- seed instruction 필요
- rule inference 어려움
- surrogate noise 존재
- search space 여전히 큼
논문에서 **TPE (Tree-structured Parzen Estimator)**를 사용하는 이유는 단순히 “Bayesian Optimization이라서”가 아니라,
LM prompt optimization이라는 문제의 구조적 특성에 매우 잘 맞기 때문입니다.
아래에서 (1) 왜 TPE인가 → (2) TPE 원리 → (3) 이 논문에서의 역할 순서로 설명하겠습니다.
1. 왜 TPE를 사용하는가?
LM program prompt optimization의 특성:
| 특성 | 영향 |
|---|---|
| gradient 없음 | gradient-based optimization 불가 |
| discrete 변수 (string, demo set) | continuous BO 어려움 |
| multi-stage coupling | 변수 간 dependency 존재 |
| evaluation cost 큼 | sample-efficient 탐색 필요 |
✔️ 기존 방법들의 한계
| 방법 | 문제 |
|---|---|
| Random search | 비효율 |
| Greedy | interaction 못 잡음 |
| RL / gradient | 불가능 (black-box) |
| GP-based BO | discrete + high-dim에서 어려움 |
✔️ TPE 선택 이유
TPE는 다음을 만족:
1. Discrete / categorical optimization 가능
- instruction choice (string index)
- demo set 선택
–> 자연스럽게 처리 가능
2. Sample-efficient
- 적은 평가로 좋은 영역 집중 탐색
–> LM 호출 비용 절감
3. Joint optimization 가능
- multi-variable dependency 모델링
–> multi-stage prompt optimization에 적합
4. No gradient / no embedding 필요
–> API 환경에서도 사용 가능
결론
TPE는 black-box + discrete + expensive evaluation 문제에 최적화된 BO 방법
2. TPE 알고리즘 설명
기존 Bayesian Optimization:
TPE의 핵심 아이디어
기존 BO (GP 기반):
- p(y | x) 모델링
TPE:
–> 반대로 모델링
p(x | y)
핵심 구조
score y = µ(Φ(x))
threshold 기준으로 분리:
Good region
Bad region
목적
다음 후보 x 선택:
✔️ 직관
- l(x): 좋은 성능 영역에서 자주 등장하는 parameter
- g(x): 나쁜 영역에서 등장하는 parameter
–> 좋은 영역에 가깝고, 나쁜 영역에는 없는 x 선택
3. TPE 동작 과정 (step-by-step)
Step 1. 초기 샘플링
- random하게 여러 x 평가
Step 2. good / bad split
예:
- 상위 20% → good set
- 나머지 → bad set
Step 3. density estimation
각 변수별로:
- l(x): good distribution
- g(x): bad distribution
–> KDE 또는 categorical distribution
Step 4. candidate sampling
- l(x)에서 샘플링
- l(x)/g(x) 최대인 것 선택
Step 5. 반복
4. 이 논문에서 TPE 역할
논문에서 TPE는 다음을 담당:
역할: Credit Assignment + Search
Optimization 변수
각 module i:
전체:
TPE가 하는 일
1. 좋은 조합 학습
- 어떤 instruction + demo 조합이 좋은지 학습
2. joint dependency 반영
- module 간 interaction 고려
3. 다음 후보 생성
- promising configuration sampling
Mini-batch와 결합
논문 특징:
–> noisy evaluation
✔️ 왜 TPE가 유리?
- noise robust (uncertainty modeling)
- full evaluation 없이도 학습 가능
5. 수식적으로 정리
Objective
TPE surrogate
Acquisition
6. 직관적 비교
Random Search
–> blind
GP-based BO
–> continuous에 강함, discrete 약함
TPE
–> discrete + structured + black-box에 최적
최종 요약
한 줄 핵심
TPE는 “좋은 prompt distribution vs 나쁜 prompt distribution”을 학습하여,
좋은 영역에 가까운 candidate를 효율적으로 탐색하는 Bayesian optimization 방법이다.
이 논문에서의 역할
multi-stage LM program에서 instruction + demo 조합을 효율적으로 탐색하기 위한 핵심 surrogate optimizer
다음은 **TPE vs GP-based Bayesian Optimization (GP-BO)**를 비교한 내용입니다.
1. 핵심 차이 한 줄 요약
| 방법 | 핵심 아이디어 |
|---|---|
| GP-BO | 를 Gaussian Process로 모델링 |
| TPE | 를 good/bad로 나눠 density ratio로 탐색 |
2. 구조적 비교
모델링 방식
| 항목 | GP-BO | TPE |
|---|---|---|
| 모델링 대상 | ||
| surrogate | Gaussian Process | KDE / categorical density |
| uncertainty | 명시적 (variance) | implicit (density ratio) |
Acquisition 방식
GP-BO
- mean + variance 활용
TPE
- good vs bad density ratio
3. 탐색 특성 비교
| 특성 | GP-BO | TPE |
|---|---|---|
| 탐색 방식 | global smooth search | region-based sampling |
| exploitation | mean 기반 | good density |
| exploration | variance 기반 | density contrast |
4. 변수 타입 처리 능력
매우 중요한 차이
| 변수 타입 | GP-BO | TPE |
|---|---|---|
| continuous | 매우 강함 | |
| discrete | 어려움 | 매우 강함 |
| categorical | 매우 어려움 | 자연스럽게 |
| combinatorial | 거의 불가 | 가능 (근사적) |
✔️ 핵심
TPE는 categorical optimization에 특화됨
5. Scaling (차원 확장성)
| 항목 | GP-BO | TPE |
|---|---|---|
| 차원 증가 | 급격히 성능 저하 | 비교적 안정 |
| 데이터 수 증가 | O(n^3) | scalable |
| 많은 trial | 부담 큼 | 적합 |
6. Noise 처리
| 항목 | GP-BO | TPE |
|---|---|---|
| noise modeling | explicit Gaussian noise | implicit |
| robustness | kernel 의존 | 비교적 robust |
7. 계산 비용
| 항목 | GP-BO | TPE |
|---|---|---|
| 학습 비용 | 높음 (matrix inverse) | 낮음 |
| update cost | expensive | cheap |
| sampling cost | moderate | cheap |
8. 직관적 이해
GP-BO
“이 함수는 smooth하다”라고 가정
–> interpolation 중심
TPE
“좋은 샘플은 특정 영역에 몰려 있다”
–> density clustering 중심
9. 이 논문(MIPRO)에서 왜 TPE인가
LM program optimization 특성:
✔️ 변수 구조
instruction_i ∈ {text candidates}
demo_i ∈ {demo sets}–> 완전히 categorical + combinatorial
✔️ 문제 특성
- gradient 없음
- black-box
- noisy evaluation (mini-batch)
- multi-stage dependency
✔️ 결론
| 요구사항 | GP-BO | TPE |
|---|---|---|
| discrete handling | ❌ | ✅ |
| scalable | ❌ | ✅ |
| noisy eval | ⚠️ | ✅ |
| LM-friendly | ❌ | ✅ |
그래서 논문은:
TPE 기반 Bayesian optimization (Optuna) 사용
10. 언제 무엇을 써야 하는가
GP-BO가 적합한 경우
- continuous space
- low dimension (< 20)
- smooth objective
- expensive evaluation (very few trials)
예:
- hyperparameter tuning (learning rate, weight decay)
TPE가 적합한 경우
- discrete / categorical
- high dimension
- noisy evaluation
- combinatorial structure
예:
- prompt optimization (이 논문)
- architecture search
- feature selection
최종 정리
핵심 비교
| GP-BO | TPE | |
|---|---|---|
| 모델 | p(y|x) | p(x|y) |
| 변수 타입 | continuous 중심 | discrete 중심 |
| scalability | 낮음 | 높음 |
| noise | 민감 | 강건 |
| LM optimization | 부적합 | 매우 적합 |
한 줄 결론
GP-BO는 “continuous smooth optimization”,
TPE는 “discrete combinatorial optimization”에 최적화된 방법이다.
답글 남기기